Machine Learning¶
Randomized Kernel Methods¶
libSkylark provides distributed implementations of kernel-based nonlinear models for
- Regularized Least Squares Regression and Classification
- Regularized Robust Regression (Least Absolute Deviation loss)
- Support Vector Machines
- Multinomial Logistic Regression (classes > 2).
The following kernels are supported:
- Gaussian, Laplacian and Matern Kernels via Random Fourier Transform (Rahimi and Recht, 2007)
- Gaussian and Matern Kernels via Fast Random Fourier Transform (Le, Sarlos and Smola, 2013)
- Gaussian and Matern Kernels via Quasi Random Fourier Transform (Yang et al, 2014)
- Polynomial Kernels via Tensor Sketch (Pahm and Pagh, 2013)
- Exponential Semigroup Kernels via Random Laplace Transform (Yang et al, 2014)
- The implementations combine two ideas:
- Constructing randomized approximations to Kernel functions on the fly
- Using a distributed optimization solver based on Alternating Directions Method of Multipliers (ADMM)
The distributed optimization approach is based on a block-splitting variant of ADMM proposed in Parikh and Boyd, 2014
- The full implementation (under libskylark/ml) is described in the following paper:
- Sindhwani V. and Avron H., High-performance Kernel Machines with Implicit Distributed Optimization and Randomization, 2014
Standalone Usage¶
Building libSkylark creates an executable called skylark_ml under CMAKE_PREFIX_INSTALL/bin. This executable can be used out-of-the-box for large-scale applications involving kernel-based modeling.
Input Data Format¶
The implementation supports LIBSVM file format, where feature vectors and labels are specified as
0 1:0.2 4:0.5 10:0.3
5 3:0.3 6:0.1
Each line begins with a label and followed by index (starting with 1)-value pairs describing the feature vector in sparse format.
We also support HDF5 data files.
- Dense training data can be described using HDF5 files containing two HDF5 datasets:
- X – n x d matrix (examples-by-features)
- Y – n x 1 matrix of labels.
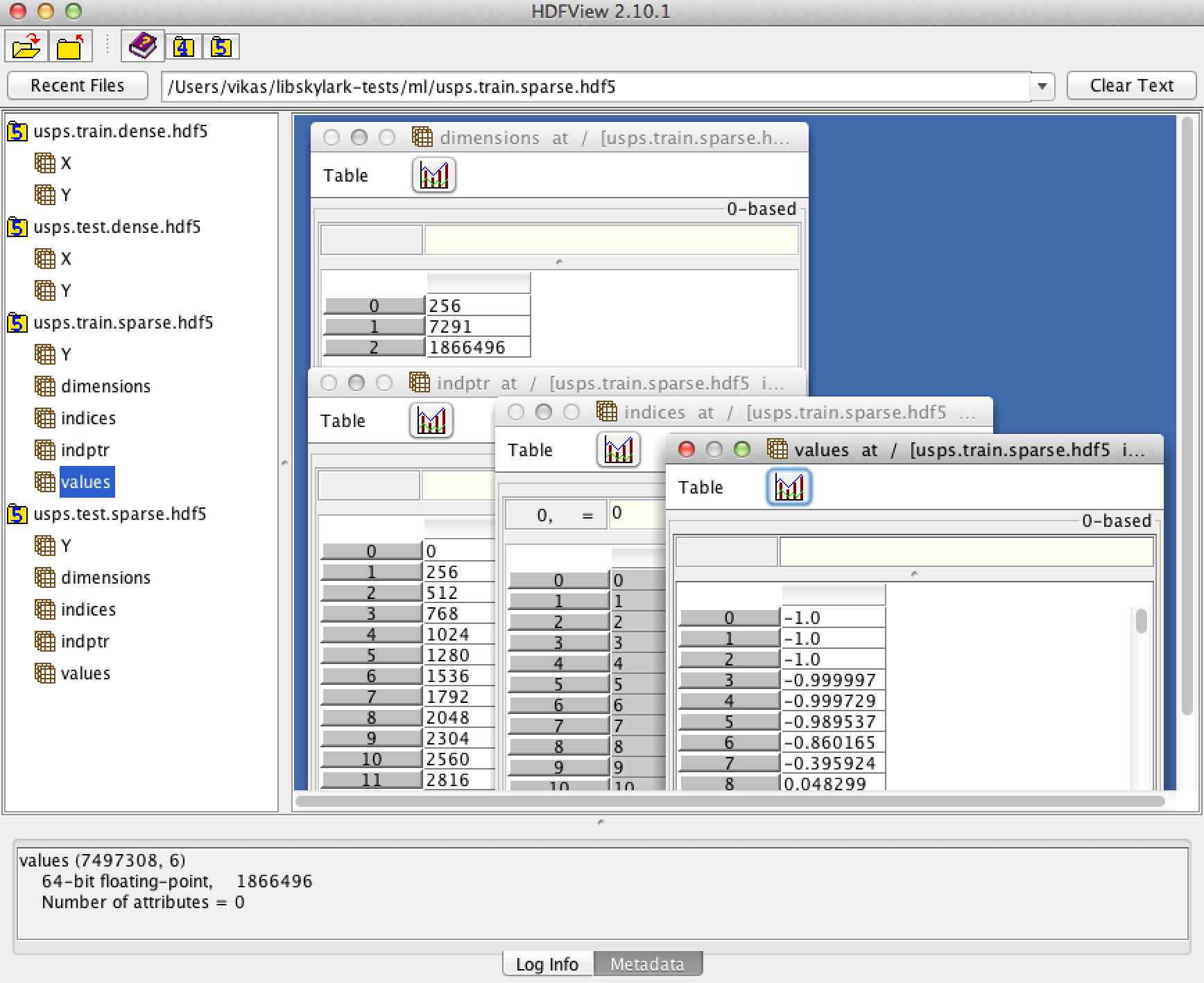
- Sparse training data can be described using HDF5 files containing five HDF5 datasets specifying a Compressed Row Storage Sparse matrix:
- dimensions: 3 x 1 matrix [number of features, number of examples, number of nonzeros (nnz)]
- indices: nnz x 1 matrix column indices of non-zero values for CRS datastructure representing the examples-by-features sparse matrix
- values: nnz x 1 non-zero values corresponding to indices
- indptr: (n+1) x 1 - pointer into indices, values specifying rows
- Y: n x 1 matrix of labels
Examples of such files can be downloaded from here. The HDF5 files can be viewed using HDFView. A screenshot is shown below.
Example and Commandline Usage¶
Please see Learning Non-Linear Models
Usage: skylark_ml [options] --trainfile trainfile --modelfile modelfile
Usage: skylark_ml --modelfile modelfile --testfile testfile :
-h [ --help ] produce a help message
-l [ --lossfunction ] arg (=0) Loss function (0:SQUARED, 1:LAD,
2:HINGE, 3:LOGISTIC)
-r [ --regularizer ] arg (=0) Regularizer (0:L2, 1:L1)
-k [ --kernel ] arg (=0) Kernel (0:LINEAR, 1:GAUSSIAN,
2:POLYNOMIAL, 3:LAPLACIAN,
4:EXPSEMIGROUP, 5:MATERN)
-g [ --kernelparam ] arg (=1) Kernel Parameter
-x [ --kernelparam2 ] arg (=0) If Applicable - Second Kernel Parameter
(Polynomial Kernel: c)
-y [ --kernelparam3 ] arg (=1) If Applicable - Third Kernel Parameter
(Polynomial Kernel: gamma)
-c [ --lambda ] arg (=0) Regularization Parameter
-e [ --tolerance ] arg (=0.001) Tolerance
--rho arg (=1) ADMM rho parameter
-s [ --seed ] arg (=12345) Seed for Random Number Generator
-f [ --randomfeatures ] arg (=100) Number of Random Features (default:
100)
-n [ --numfeaturepartitions ] arg (=1)
Number of Feature Partitions (default:
1)
-t [ --numthreads ] arg (=1) Number of Threads (default: 1)
--regression Build a regression model(default is
classification).
--usefast Use 'fast' feature mapping, if
available. Default is to use 'regular'
mapping.
-q [ --usequasi ] arg (=0) If possible, change the underlying
sequence of samples (0:Regular/Monte
Carlo, 1:Leaped Halton)
--cachetransforms Cache feature expanded data (faster,
but more memory demanding).
--fileformat arg (=0) Fileformat (default: 0 (libsvm->dense),
1 (libsvm->sparse), 2 (hdf5->dense), 3
(hdf5->sparse)
-i [ --MAXITER ] arg (=20) Maximum Number of Iterations (default:
10)
--trainfile arg Training data file (required in
training mode)
--modelfile arg Model output file
--valfile arg Validation file (optional)
--testfile arg Test file (required in testing mode)
--outputfile arg Base name for output file (will attach
.txt suffix)
Library Usage¶
To be documented (please see ml/skylark_ml.cpp for a driver program).
Graph Computations¶
Community Detection using Seed Nodes¶
In community detection problems (i.e., graph clustering problems), one seeks to identify a set of nodes in a graph that are both internally cohesive and also well separated from the remainder of the graph. Such sets are then referred to as communities or clusters. In one important variant of community detection, the goal is to build a community around a given seed node or set of seed nodes. That is, the algorithm is given, as an input, a node (or nodes) in the graph, and the goal is to find a cluster in which it is a member.
- The library implements the algorithm reported in the following paper:
- H. Avron and L. HoreshCommunity Detection Using Time-Dependent Personalized PageRank
The interface is as follows:
- double FindLocalCluster(const GraphType& G, const std::unordered_set<typename GraphType::vertex_type>& seeds, std::unordered_set<typename GraphType::vertex_type>& cluster, double alpha, double gamma, double epsilon, int NX, bool recursive)¶
seeds is the set of input seeds, cluster is the set of output cluster. alpha, gamma, epsilon and NX are parameters of the algorithm. See paper for details. Defaults are specified. If recursive is set to true (default is false) the algorithm will recursively use the output cluster as seed until the cluster stops improving (as measured using conductance).
The graph is specified using parameter G. The type is generic: the GraphType class is expected to support the following:
- type GraphType::vertex_type¶
Type of the graph nodes
- size_t GraphType::num_edges()¶
Return the number of edges in the graph.
- size_t GraphType::deg(vertex_type node)¶
Return the degree of the given node.
- iterator GraphType::adjanct_begin(vertex_type node)¶
Return an iterator to the start of the list of adjanct nodes of the input node. The iterator can be of any kind (must support increment, deref and comparison).
- iterator GraphType::adjanct_end(vertex_type node)¶
Return an iterator to the end of the list of adjanct nodes of the input node.
Time-Dependent Personalized PageRank¶
The community detection algorithm is based on a localized solution of a Time-Dependent Personlized PageRank diffusion problem. See the paper for details:
The library also exposes the ability to solve the diffusion problem. In this functionality, the input is a scalar function on nodes, and the output is a vector function on nodes. Each entry of the vector represents a different time point.
The interface is as follows:
- void TimeDependentPPR(const GraphType& G, const std::unordered_map<typename GraphType::vertex_type, T>& s, std::unordered_map<typename GraphType::vertex_type, El::Matrix<T>*>& y, El::Matrix<T>& x, double alpha, double gamma, double epsilon, int NX)¶
s is the input function of nodes, while y is the output. x specifies the time points which corresponds to the entries of x[node]. alpha, gamma, epsilon and NX are parameters of the algorithm. See paper for details. Defaults are specified.
The graph is specified using parameter G. The type is generic: the GraphType class is expected to support the following:
- type GraphType::vertex_type
Type of the graph nodes
- size_t GraphType::num_edges()
Return the number of edges in the graph.
- size_t GraphType::deg(vertex_type node)
Return the degree of the given node.
- iterator GraphType::adjanct_begin(vertex_type node)
Return an iterator to the start of the list of adjanct nodes of the input node. The iterator can be of any kind (must support increment, deref and comparison).
- iterator GraphType::adjanct_end(vertex_type node)
Return an iterator to the end of the list of adjanct nodes of the input node.
Approximate Adjacency Spectral Embedding¶
The goal of graph embedding is to assign each vertex a vector such that closeness in Euclidean space is well correlated with closeness in graph distance. Spectral embedding base the embedding on the eigenvalue decomposition of some associated matrix. In Adjacency Spectral Embedding (ASE) the embedding is computed using the eigenvalue decomposition of the adjacency matrix.
The library implements a sketched-SVD based approximate ASE, based on the description of ASE found in:
The interface is as follows:
- void ApproximateASE(const GraphType& G, int k, std::vector<typename GraphType::vertex_type>& indexmap, El::Matrix<T>& X, base::context_t& context, approximate_ase_params_t params)¶
X will be filled with the embedding. Each row of X is associated with one vertex. indexmap is a map between row index and the vertex. The parameter structure is similar to the one specified to approximate SVD.
The graph is specified using parameter G. The type is generic: the GraphType class is expected to support the following:
- type GraphType::vertex_type
Type of the graph nodes
- size_t GraphType::adjacency_matrix(base::sparse_matrix_t<T>& A, std::vector<vertex_type>& indexmap)¶
Fills the adjacency matrix of the graph
Note
Currently, approximate ASE is computed only on a single machine, and no MPI (OpenMP is used, but in a limited manner). This will change in the future.